本节介绍了针对同一用例使用不同视觉功能的可能方法。由此可以看出,一个用例通常有多种实现方法。
智能相机产品远不止只能区分好坏部件的标准相机。智能相机产品是集成式视觉传感器,可提供从图像中获取的各种数据和寄存器值。
使用案例:
需要确定饮料杯中的水位。即从杯底到液体表面的距离。
请参见下表,比较可能的视觉功能。
程序 |
结果 |
||
|---|---|---|---|
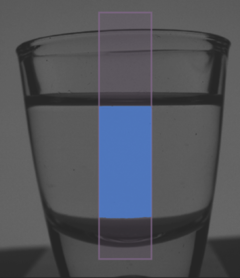
Blob |
寻找一个从底边延伸到顶边的合适表面。 |
多个值(如面积、长度、宽度、平均灰度值、最小/最大位置 X/Y),可精确确定搜索量。 |
|
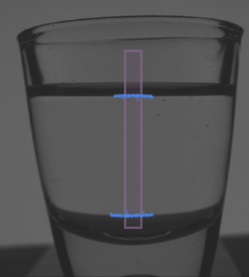
Matching |
检测下填充层和上填充层的教入边。 |
两条边的 X/Y 位置。差值等于填充水平。 |
|
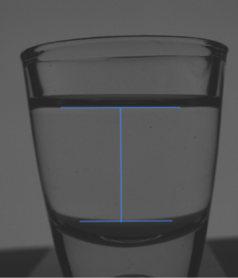
Measurement |
提取边缘并测量距离。 |
位置 X/Y 和两条边之间的距离。 |
|
This section shows the possible ways to use different vision functions for the same use case. With this, it should be made clear that there are often several ways to implement a use case.
Smart Camera products are much more than a standard camera, which can only distinguish between good and bad parts. Smart Camera products are integrated vision sensors that provide various data and register values obtained from an image.
Use case:
The filling level of a drinking glass should be determined. That is, the distance from the bottom of the glass to the surface of the liquid.
See the following table that compares the possible vision functions.
Procedure |
Result |
||
|---|---|---|---|
Blob |
Looks for a suitable surface that extends from the bottom edge to the top edge. |
Several values (e.g. Area, Length, Width, MeanGrayValue, Min/MaxPositionX/Y) that permit exact determination of the searched quantity. |
|
Matching |
Detects the taught-in edges from the lower and upper fill level. |
PositionX/Y of the two edges. The difference equals the fill level. |
|
Measurement |
Extracts the edges and measures the distance. |
PositionX/Y and distance between the two edges. |
|