本节指定的参数是硬件模块 I/O 映射的一部分,可通过 AS 软件访问。
UINT |
0 至 65535 |
错误类别寄存器 |
R |
|
|
BOOL |
0 或 1 |
图像处理执行状态 |
R |
|
|
DINT |
-2,147,483,648 至 2,147,483,647 |
以 1 μs 为单位的净时间 |
R |
|
|
USINT |
0 至 255 |
找到的 Blob 数量 |
R |
|
|
UINT |
0 至 65535 |
视觉函数的处理时间(微秒 |
R |
|
|
USINT |
0 至 255 |
找到的 Blob 的模型编号 |
R |
|
|
USINT |
0 至 255 |
图块灰度值的算术平均值 |
R |
|
|
BOOL |
0 或 1 |
边缘接触检测 |
R |
|
|
UDINT |
0 至 4294967295 |
以像素为单位的大小(区域),增量为 1/100 像素 |
R |
|
|
UDINT |
0 至 2622400 |
找到的 Blob 的长度 |
R |
|
|
UDINT |
0 至 2622400 |
找到的 Blob 的宽度 总是两边中较长的一边 |
R |
|
|
UDINT |
0 至 2622400 |
列方向上的极值 BLOB 区域的最小列位置 |
R |
|
|
UDINT |
0 至 2622400 |
列方向上的极值 BLOB 区域的最大列位置 |
R |
|
|
UDINT |
0 至 2622400 |
行方向上的极值 BLOB 区域的最小行位置 |
R |
|
|
UDINT |
0 至 2622400 |
行方向上的极值 BLOB 区域的最大行位置 |
R |
|
|
USINT |
0 至 100 |
找到的 Blob 的圆周率(%)。 |
R |
|
|
USINT |
0 至 100 |
找到的 Blob 的矩形度(%)。 |
R |
|
|
UINT |
0 至 57926 (sqrt(2)*4096.0) |
找到的 Blob 的几何形状 |
R |
|
|
二进制 |
-2622400 至 2622400 |
输出算法确定的找到的 Blob 内圆中心点的位置 X,单位为 1/100 像素。 |
R |
|
|
数字 |
-2622400 至 2622400 |
输出算法确定的找到的 Blob 内圆中心点的位置 Y,单位为 1/100 像素。 |
R |
|
|
UDINT |
0 至 2622400 |
输出算法确定的找到的 Blob 内圆的半径,单位为 1/100 像素。 |
R |
|
|
二进制数 |
-2622400 至 2622400 |
图像中(找到的 Blob)的 X 位置,以 1/100 像素为增量 |
R |
|
|
数字 |
-2622400 至 2622400 |
图像中(找到的 Blob 的)Y 位置,以 1/100 像素为增量 |
R |
|
|
INT |
-17999 至 18000 |
-179.99°到+180°,增量为 1/100 度 |
R |
|
|
DINT |
-2622400 至 2622400 |
此处输出偏离指定的教导对齐模型的值。以 1/100 像素为单位 |
R |
|
|
DINT |
-2622400 至 2622400 |
此处输出偏离指定的教导对齐模型的值。以 1/100 像素为单位 |
R |
|
图像处理错误
值 |
信息 |
|
|---|---|---|
UINT |
0x0001 |
vision_os_error:保留,当前未设置 |
0x0002 |
VISION_OS_xxx:保留,当前未设置 |
|
0x0004 |
vision_runtime_error:VisionServiceManager 发生异常。 |
|
0x0008 |
VISION_LIBRARY_ERROR:Vision 函数返回的 ErrorID < 10000。 |
|
0x0010 |
VISION_FUNCTION_ERROR:Vision 函数正在返回 ErrorID > 10000。 |
|
0x0020 |
VISION_FILE_ERROR:保存当前图像出错 |
|
0x0040 |
INVALID_VISION_FUNCTION:视觉函数出现异常 |
|
0x0080 至 0x8000 |
当前未使用 |
信息:
带有错误 ID 的错误信息将在 AS 软件日志记录器 "Vision "下输出。
图像处理激活
图像净时间
指定图像采集的净时间(多路采集 > 1 时为第一幅图像的净时间),图像处理结果在此时间内有效。
时间戳也会成为图像文件的名称。
结果数
功能处理时间
该参数用于指定视觉功能的处理时间,因此与处理器忙于图像处理的时间相对应。
模型编号(n)
找到的 Blob 的模型编号。根据参数NumResults 的计算值,该参数(指数为 01、02 等)会出现 n 次。参数 ModelNumber 在 I/O 映射中引入了一个新的参数块,并带有相应的索引 (n)。
平均灰度值(n)
剪切(n)
状态位,用于指示 Blob 是否触及定义的 ROI 或图像边缘。
面积(n)
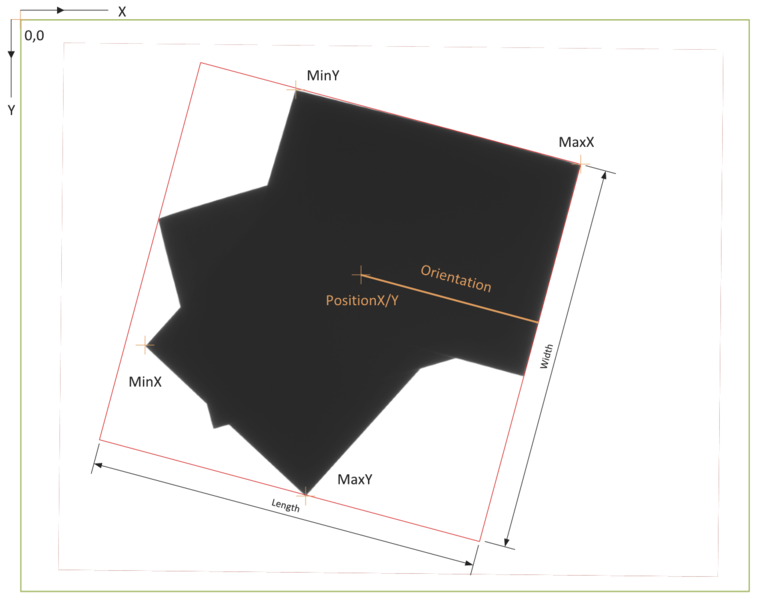
长度(n)
长度和宽度指的是包含 Blob 区域的最小矩形(任意方向)。最短的一边总是被解释为 Length。
信息:
对于变化很大的物体,哪一边是长度,哪一边是宽度,可能会有不同的解释!
宽度(n)
长度和宽度指的是包含 Blob 区域的最小矩形(任意方向)。最长边始终被解释为宽度。
信息:
对于变化较大的对象,哪一边是长度,哪一边是宽度,可能会有不同的解释!
Xmin(n)、Xmax(n)、Ymin(n)、Ymax(n)
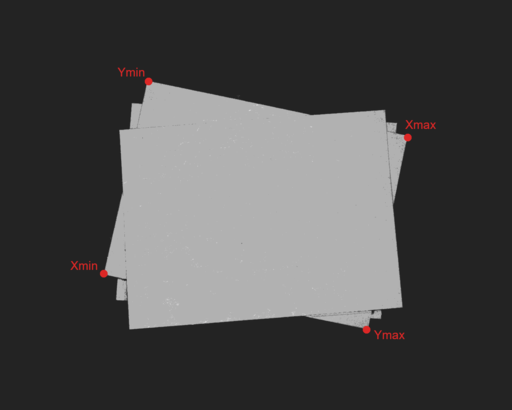
信息:
根据参数 NumSearchMax 的计算值,该参数(索引 01、02 等)会出现 n 次。
圆周率(n)
矩形度(n)
几何形状(n)
内圆位置 X(n)
InnerCircle 是找到的 Blob 内可能存在的最小圆。
内圆位置 Y(n)
InnerCircle 是找到的 Blob 内可能存在的最小圆。
内圆半径(n)
InnerCircle 是找到的 Blob 内可能存在的最小圆。
位置 X(n)
值 |
信息 |
|
|---|---|---|
数据 |
-2622400 至 2622400 |
以 1/100 像素为增量的 X 位置。因此可以选择 -26224.00 至 26223.99 像素的位置。 2622400 = 超出范围 |
信息:
根据参数 NumSearchMax 的计算值,该参数(索引 01、02 等)会出现 n 次。
PositionX 和 PositionY 是 Blob 质量中心的坐标。
位置 Y(n)
值 |
信息 |
|
|---|---|---|
数据 |
-2622400 至 2622400 |
以 1/100 像素为增量的 Y 位置。因此可以选择 -26224.00 至 26223.99 像素的位置。 2622400 = 超出范围 |
信息:
根据参数 NumSearchMax 的计算值,该参数(索引 01、02 等)会出现 n 次。
PositionX 和 PositionY 是 Blob 质量中心的坐标。
方向(n)
对于 -17999 至 18000 的数值范围,可使用的角度范围为 -179.99° 至 +180.00°。小于 -17999 和大于 18000 的值被解释为 +180 度。
信息:
根据参数 NumSearchMax 的计算值,该参数(索引 01、02 等)会出现 n 次。
以 Blob 的方向为例:
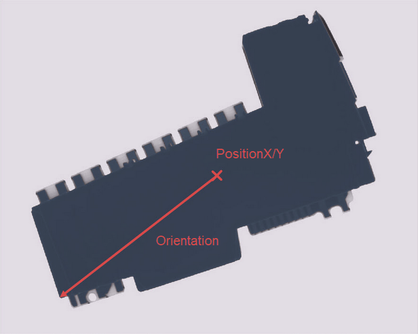
计算出的 Orientation(n) 指的是 Blob 本身,即找到的区域,而不是最小的矩形。
相反,参数 Length(n) 和 Width(n)(两个边长中较大的一个)指的是最小的矩形。
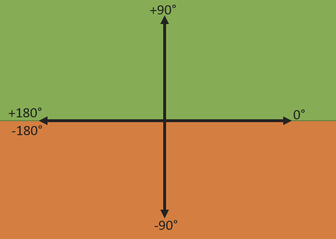
Blob 的方向始终是与图像相关的方向。在教授模型时,方向不会设置为 0,视觉功能匹配(Matching)就是这种情况。请参阅图像采集的方向进行比较:
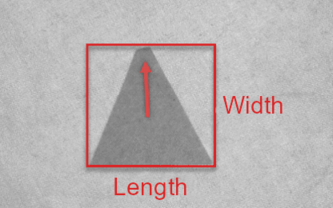
如果找到的球体具有旋转对称性,并且长度和宽度几乎相同,那么宽度和长度可能会发生变化。以三角形为例(方向不变;长度和宽度可能发生变化):
旋转中心 X
图像中(找到的对象)旋转中心的 X 位置。左上角 = 0。仅与对齐相关。
旋转中心 Y
图像中(找到的对象)旋转中心的 Y 位置。左上角 = 0。仅与对齐相关。
The parameters specified in this section are part of the I/O mapping of the hardware module that can be accessed via Automation Studio.
UINT |
0 to 65535 |
Register of error classes |
R |
|
|
BOOL |
0 or 1 |
Status of image processing execution |
R |
|
|
DINT |
-2,147,483,648 to 2,147,483,647 |
NetTime in 1 μs steps |
R |
|
|
USINT |
0 to 255 |
Number of blobs found |
R |
|
|
UINT |
0 to 65535 |
Processing time of the vision function in microseconds |
R |
|
|
USINT |
0 to 255 |
ModelNumber of the found blob |
R |
|
|
USINT |
0 to 255 |
Arithmetic mean of grayscale values for the blob |
R |
|
|
BOOL |
0 or 1 |
Edge contact detection |
R |
|
|
UDINT |
0 to 4294967295 |
Size (area) in pixels in increments of 1/100 pixel |
R |
|
|
UDINT |
0 to 2622400 |
Length of the found blob |
R |
|
|
UDINT |
0 to 2622400 |
Width of the found blob Is always the longer of the two sides |
R |
|
|
UDINT |
0 to 2622400 |
Extreme value in the column direction Minimum column position of the BLOB area |
R |
|
|
UDINT |
0 to 2622400 |
Extreme value in the column direction Maximum column position of the BLOB area |
R |
|
|
UDINT |
0 to 2622400 |
Extreme value in the line direction Minimum line position of the BLOB area |
R |
|
|
UDINT |
0 to 2622400 |
Extreme value in the line direction Maximum line position of the BLOB area |
R |
|
|
USINT |
0 to 100 |
Circularity of the found blob in % |
R |
|
|
USINT |
0 to 100 |
Rectangularity of the found blob in % |
R |
|
|
UINT |
0 to 57926 (sqrt(2)*4096.0) |
Anisometry of the found blob |
R |
|
|
DINT |
-2622400 to 2622400 |
Output of position X of the center point of inner circle of the found blob determined by the algorithm in 1/100 pixels. |
R |
|
|
DINT |
-2622400 to 2622400 |
Output of position Y of the center point of the inner circle of the found blob determined by the algorithm in 1/100 pixels. |
R |
|
|
UDINT |
0 to 2622400 |
Output of the radius of the inner circle of the found blob determined by the algorithm in 1/100 pixels. |
R |
|
|
DINT |
-2622400 to 2622400 |
X-position (of the found blob) in the image in increments of 1/100 pixel |
R |
|
|
DINT |
-2622400 to 2622400 |
Y-position (of the found blob) in the image in increments of 1/100 pixel |
R |
|
|
INT |
-17999 to 18000 |
-179.99° to +180° in increments of 1/100 degree |
R |
|
|
DINT |
-2622400 to 2622400 |
The value deviating from the specified taught-in Alignment model is output here. In 1/100 pixel steps |
R |
|
|
DINT |
-2622400 to 2622400 |
The value deviating from the specified taught-in Alignment model is output here. In 1/100 pixel steps |
R |
|
ImageProcessingError
Values |
Information |
|
|---|---|---|
UINT |
0x0001 |
VISION_OS_ERROR: Reserved, currently not set |
0x0002 |
VISION_OS_xxx: Reserved, currently not set |
|
0x0004 |
VISION_RUNTIME_ERROR: An exception has occurred in VisionServiceManager. |
|
0x0008 |
VISION_LIBRARY_ERROR: The vision function is returning an ErrorID < 10000. |
|
0x0010 |
VISION_FUNCTION_ERROR: The vision function is returning an ErrorID > 10000. |
|
0x0020 |
VISION_FILE_ERROR: Error saving the current image |
|
0x0040 |
INVALID_VISION_FUNCTION: Exception by the vision function |
|
0x0080 to 0x8000 |
Currently not in use |
Information:
Error messages with an error ID are output in the Automation Studio Logger under "Vision".
ImageProcessingActive
The status bit indicates whether image processing is currently being performed or not.
ImageNettime
Specifies the NetTime of the image acquisition (with MultiCapture > 1 that of the first image) for which the results of the image processing are valid.
The timestamp also becomes the name of the image file.
Values |
Information |
|
|---|---|---|
DINT |
-2,147,483,648 to 2,147,483,647 |
NetTime timestamp from 1 µs to 4294 s in increments of 1 µs (absolute NetTime). |
NumResults
Number of objects found. The value then corresponds to the maximum value of counter variable n.
FunctionProcessingTime
This parameter specifies the processing time for the vision function, and thus corresponds to the time in which the processor is busy for image processing.
Values |
Information |
|
|---|---|---|
UINT |
0 to 65535 |
Value for a processing time of 1 ms to 65.5 s in 1 ms steps. |
ModelNumber(n)
Model number of the found blob. Depending on the calculated value of parameter NumResults , this parameter (with indices 01, 02, etc.) occurs n times. Parameter ModelNumber introduces a new block of parameters in the I/O mapping with the corresponding index (n).
MeanGrayValue(n)
Arithmetic mean of the grayscale values of all the pixels in the blob.
Clipped(n)
Status bit that indicates whether a blob touches the defined ROI or the edge of the image.
Area(n)
Size (area) of the found blob.
Values |
Information |
|
|---|---|---|
UDINT |
0 to 4294967295 |
Size (area) in pixels in increments of 1/100 pixel. An area of 42949672.95 pixels can therefore be theoretically displayed. |
Length(n)
Length and Width refer to the smallest rectangle (of any orientation) that encompasses the blob area. The shortest side is always interpreted as Length.
Information:
For objects with a high degree of variation, it is therefore possible for varying interpretations regarding which side is Length and which is Width!
Values |
Information |
|
|---|---|---|
UDINT |
0 to 2622400 |
Length of the found blob in increments of 1/100 pixel. A length from 0 to 26224.00 pixels can therefore be selected. |
Width(n)
Length and Width refer to the smallest rectangle (of any orientation) that encompasses the blob area. The longest side is always interpreted as Width.
Information:
For objects with a high degree of variation, it is therefore possible for varying interpretations regarding which side is Length and which is Width!
Values |
Information |
|
|---|---|---|
UDINT |
0 to 2622400 |
Width of the found blob in increments of 1/100 pixel. A width from 0 to 26224.00 pixels can therefore be selected. |
Xmin(n), Xmax(n), Ymin(n), Ymax(n)
Extrema of the column and row directions.
Values |
Information |
|
|---|---|---|
UDINT |
0 to 2622400 |
Position in 1/100 pixel increments. A position from 0 to 26223.99 pixels can therefore be selected. 2622400 = Out of range |
Information:
Depending on the calculated value of parameter NumSearchMax, this parameter (with indices 01, 02, etc.) occurs n times.
Circularity(n)
Output value of the circularity of the found blob
Rectangularity(n)
Output value of the rectangularity of the found blob
Anisometry(n)
Output value of the anisometry of the found blob
InnerCirclePositionX(n)
Output of position X of the center point of the inner circle of the found blob determined by the algorithm.
InnerCircle is the smallest possible circle within a found blob.
Values |
Information |
|
|---|---|---|
DINT |
-2622400 to 2622400 |
Output of position X of the center point of inner circle of the found blob determined by the algorithm in 1/100 pixels. |
InnerCirclePositionY(n)
Output of position Y of the center point of the inner circle of the found blob determined by the algorithm.
InnerCircle is the smallest possible circle within a found blob.
Values |
Information |
|
|---|---|---|
DINT |
-2622400 to 2622400 |
Output of position Y of the center point of the inner circle of the found blob determined by the algorithm in 1/100 pixels. |
InnerCircleRadius(n)
Output of the radius of the inner circle of the found blob determined by the algorithm.
InnerCircle is the smallest possible circle within a found blob.
Values |
Information |
|
|---|---|---|
UDINT |
0 to 2622400 |
Output of the radius of the inner circle of the found blob determined by the algorithm in 1/100 pixels. |
PositionX(n)
X-position (of the found object) in the image. Top left = 0
Values |
Information |
|
|---|---|---|
DINT |
-2622400 to 2622400 |
X position in increments of 1/100 pixel. A position from -26224.00 to 26223.99 pixels can therefore be selected. 2622400 = Out of range |
Information:
Depending on the calculated value of parameter NumSearchMax, this parameter (with indices 01, 02, etc.) occurs n times.
PositionX and PositionY are the coordinates for the center of mass of the blob.
PositionY(n)
Y-position (of the found object) in the image. Top left = 0
Values |
Information |
|
|---|---|---|
DINT |
-2622400 to 2622400 |
Y position in increments of 1/100 pixel. A position from -26224.00 to 26223.99 pixels can therefore be selected. 2622400 = Out of range |
Information:
Depending on the calculated value of parameter NumSearchMax, this parameter (with indices 01, 02, etc.) occurs n times.
PositionX and PositionY are the coordinates for the center of mass of the blob.
Orientation(n)
The orientation is specified in increments of 1/100 degrees.
For the range of values -17999 to 18000, this results in a usable range of angles from -179.99° to +180.00°. Values less than -17999 and greater than 18000 are interpreted as +180 degrees.
Information:
Depending on the calculated value of parameter NumSearchMax, this parameter (with indices 01, 02, etc.) occurs n times.
Example for the orientation of a blob:
The calculated Orientation(n) refers to the blob itself, i.e. the found region, and not to the smallest rectangle.
In contrast, parameters Length(n) and Width(n) (larger of the two side lengths) refer to the smallest rectangle.
The orientation of the blob is always the orientation related to the image. The orientation is not set to 0 when a model is taught as is the case with vision function Matching. See the orientation of an image acquisition for comparison:
If the found blob has rotational symmetry and the length and width are nearly the same, it may happen that the width and the length can change. See a triangle as an example (Orientation remains the same; Length and Width can change):
RotCenterX
X-position of the center of rotation (of the found object) in the image. Top left = 0. Only relevant for Alignment.
Values |
Information |
|
|---|---|---|
UDINT |
-2622400 to 2622400 |
The value deviating from the specified taught-in Alignment model is output here. In 1/100 pixel steps. |
RotCenterY
Y-position of the center of rotation (of the found object) in the image. Top left = 0. Only relevant for Alignment.